@inproceedings{aboah2023deepsegmenter,
title={Deepsegmenter: Temporal action localization for detecting anomalies in untrimmed naturalistic driving videos},
author={Aboah, Armstrong and Bagci, Ulas and Mussah, Abdul Rashid and Owor, Neema Jakisa and Adu-Gyamfi, Yaw},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={5358--5364},
year={2023}
}
Identifying unusual driving behaviors exhibited by drivers during driving is essential for understanding driver behavior and the underlying causes of crashes. Previous studies have primarily approached this problem as a classification task, assuming that naturalistic driving videos come discretized. However, both activity segmentation and classification are required for this task due to the continuous nature of naturalistic driving videos. The current study therefore departs from conventional approaches and introduces a novel methodological framework, DeepSegmenter, that simultaneously performs activity segmentation and classification in a single framework. The proposed framework consists of four major modules namely Data Module, Activity Segmentation Module, Classification Module and Postprocessing Module. Our proposed method won 8th place in the 2023 AI City Challenge, Track 3, with an activity overlap score of 0.5426 on experimental validation data. The experimental results demonstrate the effectiveness, efficiency, and robustness of the proposed system.
Armstrong Aboah, Bin Wang, Ulas Bagci,Yaw Adu-Gyamfi. (2023). Real-time Multi-Class Helmet Violation Detection Using Few-Shot Data Sampling Technique and YOLOv8. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.
@inproceedings{aboah2023real,
title={Real-time multi-class helmet violation detection using few-shot data sampling technique and yolov8},
author={Aboah, Armstrong and Wang, Bin and Bagci, Ulas and Adu-Gyamfi, Yaw},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={5349--5357},
year={2023}
}
Traffic safety is a major global concern. Helmet usage is a key factor in preventing head injuries and fatalities caused by motorcycle accidents. However, helmet usage violations continue to be a significant problem. To identify such violations, automatic helmet detection systems have been proposed and implemented using computer vision techniques. Real-time implementation of such systems is crucial for traffic surveillance and enforcement, however, most of these systems are not real-time. This study proposes a robust real-time helmet violation detection system. The proposed system utilizes a unique data processing strategy, referred to as few-shot data sampling, to develop a robust model with fewer annotations, and a single-stage object detection model, YOLOv8 (You Only Look Once Version 8), for detecting helmet violations in real-time from video frames. Our proposed method won 7th place in the 2023 AI City Challenge, Track 5, with an mAP score of 0.5861 on experimental validation data. The experimental results demonstrate the effectiveness, efficiency, and robustness of the proposed system.
Bin Wang, Armstrong Aboah, Zheyuan Zhang, Ulas Bagci (2023). GAZESAM: What You See Is What You Segment. arXiv: 2304.13844..
@article{wang2023gazesam,
title={Gazesam: What you see is what you segment},
author={Wang, Bin and Aboah, Armstrong and Zhang, Zheyuan and Bagci, Ulas},
journal={arXiv preprint arXiv:2304.13844},
year={2023}
}
This study investigates the potential of eye-tracking technology and the Segment Anything Model (SAM) to design a collaborative human-computer interaction system that automates medical image segmentation. We present the \textbf{GazeSAM} system to enable radiologists to collect segmentation masks by simply looking at the region of interest during image diagnosis. The proposed system tracks radiologists' eye movement and utilizes the eye-gaze data as the input prompt for SAM, which automatically generates the segmentation mask in real time. This study is the first work to leverage the power of eye-tracking technology and SAM to enhance the efficiency of daily clinical practice. Moreover, eye-gaze data coupled with image and corresponding segmentation labels can be easily recorded for further advanced eye-tracking research. The code is available in \url{this https URL}.
Armstrong Aboah, Yaw Adu-Gyamfi et al. (2023). Driver maneuver detection and analysis using time series segmentation and classification. Journal of Transportation Engineering Part A: Systems.
@article{aboah2023driver,
title={Driver maneuver detection and analysis using time series segmentation and classification},
author={Aboah, Armstrong and Adu-Gyamfi, Yaw and Gursoy, Senem Velipasalar and Merickel, Jennifer and Rizzo, Matt and Sharma, Anuj},
journal={Journal of transportation engineering, Part A: Systems},
volume={149},
number={3},
pages={04022157},
year={2023},
publisher={American Society of Civil Engineers}
}
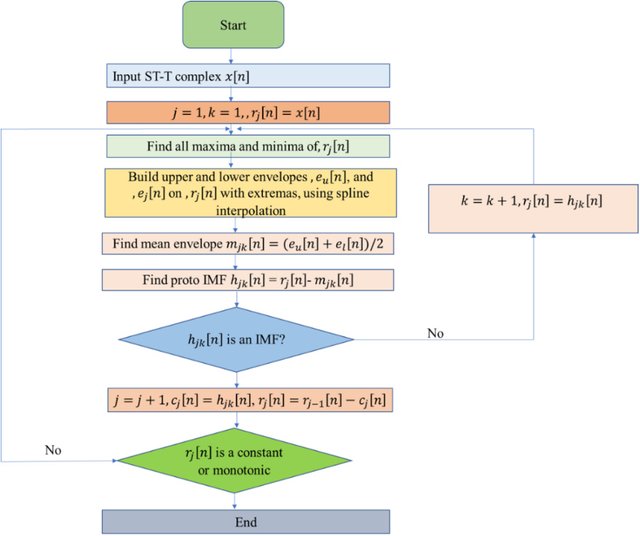
The current paper implements a methodology for automatically detecting vehicle maneuvers from vehicle telemetry data under naturalistic driving settings. Previous approaches have treated vehicle maneuver detection as a classification problem, although both time series segmentation and classification are required since input telemetry data are continuous. Our objective is to develop an end-to-end pipeline for the frame-by-frame annotation of naturalistic driving studies videos into various driving events including stop and lane-keeping events, lane changes, left-right turning movements, and horizontal curve maneuvers. To address the time series segmentation problem, the study developed an energy-maximization algorithm (EMA) capable of extracting driving events of varying durations and frequencies from continuous signal data. To reduce overfitting and false alarm rates, heuristic algorithms were used to classify events with highly variable patterns such as stops and lane-keeping. To classify segmented driving events, four machine-learning models were implemented, and their accuracy and transferability were assessed over multiple data sources. The duration of events extracted by EMA was comparable to actual events, with accuracies ranging from 59.30% (left lane change) to 85.60% (lane-keeping). Additionally, the overall accuracy of the 1D-convolutional neural network model was 98.99%, followed by the long-short-term-memory model at 97.75%, then the random forest model at 97.71%, and the support vector machine model at 97.65%. These model accuracies were consistent across different data sources. The study concludes that implementing a segmentation-classification pipeline significantly improves both the accuracy of driver maneuver detection and the transferability of shallow and deep ML models across diverse datasets.
Armstrong Aboah, Yaw Adu-Gyamfi. (2020). Smartphone-based pavement roughness estimation using deep learning with entity embedding. Advances in Data Science and Adaptive Analysis 12 (03n04), 2050007.
@article{aboah2020smartphone,
title={Smartphone-based pavement roughness estimation using deep learning with entity embedding},
author={Aboah, Armstrong and Adu-Gyamfi, Yaw},
journal={Advances in Data Science and Adaptive Analysis},
volume={12},
number={03n04},
pages={2050007},
year={2020},
publisher={World Scientific}
}
The commonly used index for measuring pavement roughness is the International Roughness index (IRI). Traditional method for collecting road surface information is expensive and as such researchers over the years have resorted to other cheaper ways of collecting data. This study focuses on developing a deep learning model to quickly and accurately determine the IRI values of road sections at a cheaper cost. The study proposed a model that uses accelerometer data and previous year’s IRI values to predict current year IRI values. The study concludes that addition of accelerometer readings to previous year’s IRIs increased the accuracy of prediction.
Armstrong Aboah*, Maged Shoman*, Vishal Mandal, Yaw Adu-Gyamfi et al. (2021). A vision-based system for traffic anomaly detection using deep learning and decision trees. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).
@inproceedings{aboah2021vision,
title={A vision-based system for traffic anomaly detection using deep learning and decision trees},
author={Aboah, Armstrong},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={4207--4212},
year={2021}
}
Any intelligent traffic monitoring system must be able to detect anomalies such as traffic accidents in real time. In this paper, we propose a Decision-Tree - enabled approach powered by Deep Learning for extracting anomalies from traffic cameras while accurately estimating the start and end time of the anomalous event. Our approach included creating a detection model, followed by anomaly detection and analysis. YOLOv5 served as the foundation for our detection model. The anomaly detection and analysis step entail traffic scene background estimation, road mask extraction, and adaptive thresholding. Candidate anomalies were passed through a decision tree to detect and analyze final anomalies. The proposed approach yielded an F1 score of 0.8571, and an S4 score of 0.5686, per the experimental validation.
Maged Shoman*, Armstrong Aboah*, Yaw Adu-Gyamfi et al. (2022). A region-based deep learning approach to automated retail checkout. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
@inproceedings{shoman2022region,
title={A region-based deep learning approach to automated retail checkout},
author={Shoman, Maged and Aboah, Armstrong and Morehead, Alex and Duan, Ye and Daud, Abdulateef and Adu-Gyamfi, Yaw},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={3210--3215},
year={2022}
}
Automating the product checkout process at conventional retail stores is a task poised to have large impacts on society generally speaking. Towards this end, reliable deep learning models that enable automated product counting for fast customer checkout can make this goal a reality. In this work, we propose a novel, region-based deep learning approach to automate product counting using a customized YOLOv5 object detection pipeline and the DeepSORT algorithm. Our results on challenging, real-world test videos demonstrate that our method can generalize its predictions to a sufficient level of accuracy and with a fast enough runtime to warrant deployment to real-world commercial settings. Our proposed method won 4th place in the 2022 AI City Challenge, Track 4, with an F1 score of 0.4400 on experimental validation data.
Maged Shoman, Armstrong Aboah, Yaw Adu-Gyamfi (2020). Deep learning framework for predicting bus delays on multiple routes using heterogenous datasets. Journal of Big Data Analytics in Transportation 2, 275-290
@article{shoman2020deep,
title={Deep learning framework for predicting bus delays on multiple routes using heterogenous datasets},
author={Shoman, Maged and Aboah, Armstrong and Adu-Gyamfi, Yaw},
journal={Journal of Big Data Analytics in Transportation},
volume={2},
pages={275--290},
year={2020},
publisher={Springer}
}
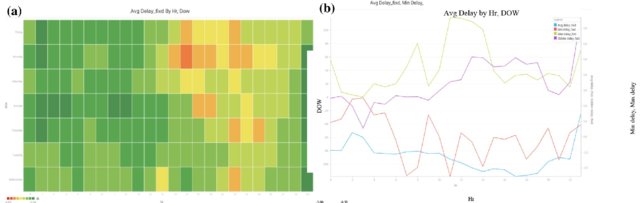
Accurate prediction of bus delays improves transit service delivery and can potentially increase passenger use and satisfaction. To date, models developed for predicting bus delays have been restricted to single routes because of their poor performance on a wide network, due to reliance on simplistic model architectures and limited sources of data. This paper proposes a deep learning-based framework for predicting bus delays at the network level. The framework is fueled by large, heterogenous bus transit data (GTFS) and vehicle probe data. We utilize entity embeddings to enable the framework to simultaneously fit functions and learn patterns from both categorical and continuous data streams. The framework results in a single model that is able to characterize the factors influencing delays on multiple routes, for multiple stations at a time, at different times of the day, and during different seasons. A case study was conducted in Saint Louis, Missouri, with data collected over a 1-month period. The results indicate that the developed modeling framework is high performing, predicting delays for multiple stops at a mean absolute percentage error (MAPE) of about 6%. For different routes and trips, the observed prediction errors were stable across days of week, bus stops, holidays, and time of day. Although peak hour factors and the distance to bus stop influenced the model’s prediction errors for some routes, the observed differences were not significant. Compared to previous research, the ability to simultaneously model continuous and categorical data with deep learning and the use of heterogenous data contributed to such high performance on multiple routes.
Ashkan Behzadian, Tanner Wambui Muturi, Amanda Mullins, Armstrong Aboah, Yaw Adu-Gyamfi et al. (2022). The 1st data science for pavements challenge. arXiv preprint arXiv:2206.04874
@article{behzadian20221st,
title={The 1st data science for pavements challenge},
author={Behzadian, Ashkan and Muturi, Tanner Wambui and Zhang, Tianjie and Kim, Hongmin and Mullins, Amanda and Lu, Yang and Owor, Neema Jasika and Adu-Gyamfi, Yaw and Buttlar, William and Hamed, Majidifard and others},
journal={arXiv preprint arXiv:2206.04874},
year={2022}
}
The Data Science for Pavement Challenge (DSPC) seeks to accelerate the research and development of automated vision systems for pavement condition monitoring and evaluation by providing a platform with benchmarked datasets and codes for teams to innovate and develop machine learning algorithms that are practice-ready for use by industry. The first edition of the competition attracted 22 teams from 8 countries. Participants were required to automatically detect and classify different types of pavement distresses present in images captured from multiple sources, and under different conditions. The competition was data-centric: teams were tasked to increase the accuracy of a predefined model architecture by utilizing various data modification methods such as cleaning, labeling and augmentation. A real-time, online evaluation system was developed to rank teams based on the F1 score. Leaderboard results showed the promise and challenges of machine for advancing automation in pavement monitoring and evaluation. This paper summarizes the solutions from the top 5 teams. These teams proposed innovations in the areas of data cleaning, annotation, augmentation, and detection parameter tuning. The F1 score for the top-ranked team was approximately 0.9. The paper concludes with a review of different experiments that worked well for the current challenge and those that did not yield any significant improvement in model accuracy.
Armstrong Aboah, Michael Boeding, Yaw Adu-Gyamfi (2022). Mobile Sensing for Multipurpose Applications in Transportation. Journal of big data analytics in transportation
@article{aboah2022mobile,
title={Mobile sensing for multipurpose applications in transportation},
author={Aboah, Armstrong and Boeding, Michael and Adu-Gyamfi, Yaw},
journal={Journal of big data analytics in transportation},
volume={4},
number={2-3},
pages={171--183},
year={2022},
publisher={Springer}
}
Routine and consistent data collection is required to address contemporary transportation issues. The cost of data collection increases significantly when sophisticated machines are used to collect data. Due to this constraint, State Departments of Transportation struggle to collect consistent data for analyzing and resolving transportation problems in a timely manner. Recent advancements in sensors integrated into smartphones have resulted in a more affordable method of data collection. The primary objective of this study is to develop and implement a smartphone-based application for transportation-related data collection. The app consists of three major modules: a frontend graphical user interface (GUI), a sensor module, and a backend module. While the frontend GUI enables interaction with the app, the sensor modules collect relevant data such as video, gyroscope, motion and accelerometer readings while the app is in use. The backend leverages a real-time database to stream and store data from sensors, together with providing the computational resources needed to support the application. In comparison to other developed apps for transportation data collection, this app is not overly reliant on the internet enabling the app to be used in internet-restricted areas. Additionally, the app is designed for multipurpose applications in transportation. The collected data were analyzed for a variety of purposes, including calculating the International Roughness Index (IRI), identifying pavement distresses, and understanding driver’s behaviors and environment. From the sensor data, we detected turning movements, lane changes and estimated IRI values. In addition, several pavement distresses were identified from the video data with machine learning.